
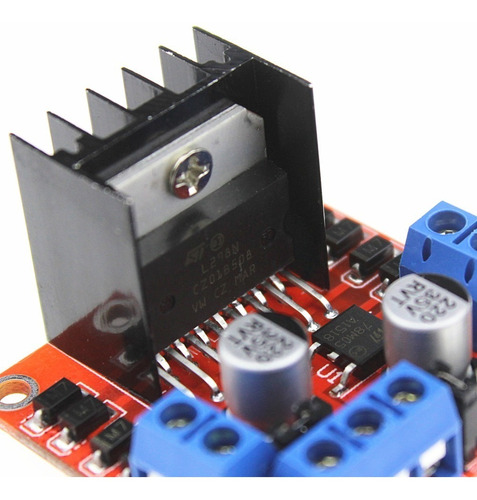
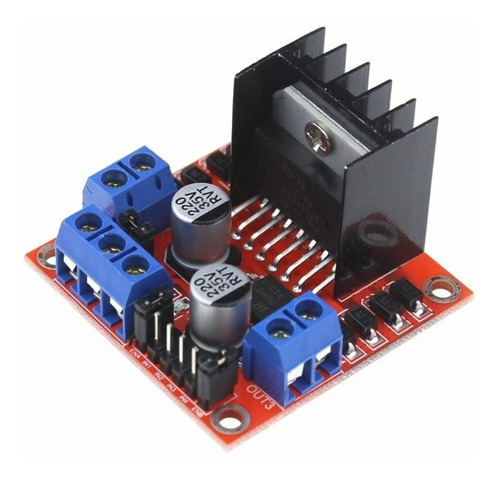
Controlador Board Módulo L298n Para Arduino Ponte Dupla H
em 12x
Saiba os prazos de entrega e as formas de envio.
Último disponível!
MercadoLíder | +1000 vendas
- Você tem 30 dias a partir da data de recebimento.
- Compra GarantidaVai abrir em uma nova janela, receba o produto que está esperando ou devolvemos o dinheiro.
VERISERVA12

MercadoLíder
É um dos melhores do site!
+1000
Vendas concluídas

Oferece um bom atendimento

Entrega os produtos dentro do prazo
Devolução grátis
Você tem 30 dias a partir do recebimento do produto para devolvê-lo, não importa o motivo!
Meios de pagamento








Características do produto
Características principais
Marca | TRONIC |
|---|---|
Modelo | L298N |
Outros
Tensão de operação | 7-12vts |
|---|---|
Voltagem de entrada recomendado | 9v |
Voltagem de entrada límite | 9v |
Largura | 5.334 cm |
Peso | 20 g |
Quantidade de entradas análogicas | 4 |
Quantidade de pinos digitais de entrada e saída | 8 |
Inclui cabo USB | Não |
É kit | Não |
Descrição
O Escudo Do Motor é baseado no L298which é um dual-ponte completa driver projetado para conduzir cargas indutivas tais como relés, solenóides, DC e motores de passo. ele permite que você dirija dois motores DC com o seu conselho, controlar a velocidade e direção de cada um de forma independente. você também pode medir a absorção de cada motor de corrente do motor, entre outras características. o escudo é TinkerKit compatível, o que significa que você pode criar rapidamente projetos ligando módulos TinkerKit para o conselho.
o Arduino Escudo Do Motor deve ser alimentado apenas por uma fonte de alimentação externa. porque o L298IC montado sobre o escudo tem duas conexões de alimentação separada, um para a lógica e um para a alimentação do motor motorista. a corrente do motor necessário muitas vezes excede o máximo USB classificação atual.
externo (não-USB) o poder pode vir tanto de um AC-to-adaptador DC (parede-verruga) ou a bateria. o adaptador pode ser ligado por ligar a 2.1mm do centro-positivo ligar para o Arduino jack de alimentação da placa em que o escudo do motor é montado ou através da ligação a fios que conduzem o fornecimento de energia para o Vin e GND terminais de parafuso, tomando o cuidado de respeitar as polaridades.
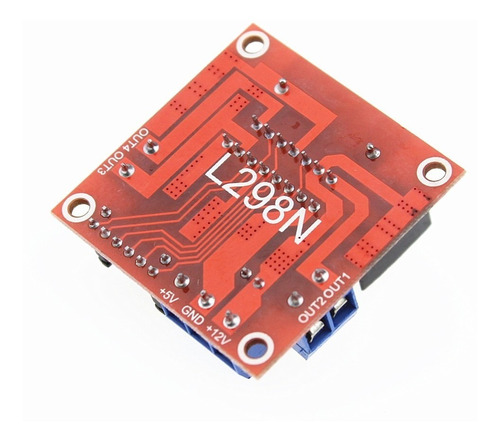
para evitar possíveis danos para a placa Arduino em que o escudo é montado, recomendamos o uso de uma fonte de alimentação externa que fornece uma tensão entre 7 e 12 V. se o seu motor exigem mais do que 9 V recomendamos que você separar o poder linhas do escudo e a placa Arduino em que o escudo é montado. isso é possível através do corte da fibra " Vin Connect " jumper colocado sobre o lado de trás do escudo. o limite absoluto para o Vin com os terminais de parafuso é 18 V.
os pinos de alimentação são como se segue:
Vin no screw terminal block, é a tensão de entrada para o motor ligado para o escudo. uma fonte de alimentação externa ligada a este pino também fornecem energia para a placa Arduino no qual está montado. através do corte da fibra " Vin Connect " jumper você fazem deste um dedicado linha de alimentação para o motor.
GND Terra sobre o parafuso do bloco de terminais.
o escudo pode fornecer de 2 amperes por canal, para um total de 4 ampères máxima.
Introdução do Produto
Este escudo tem dois canais separados, chamado A e B, que cada uso 4 de os pinos do Arduino para dirigir ou sentido o motor. no total há 8 pinos em uso com este escudo. você pode usar cada canal separadamente para conduzir dois motores de corrente CONTÍNUA ou combiná-los para conduzir um motor de passo bipolar.
o escudo de pinos, dividido por canal são mostrados na tabela abaixo:
pinos de função por Ch. um pinos por Ch. B
direção D12 D13
PWM D3 D11
freio D8 D9
atual Sensoriamento A0 A1
se você não precisa do Freio e a Detecção de Corrente e você também precisa de mais pinos para o seu aplicativo que você pode desativar esse características cortando os respectivos jumpers na parte de trás do escudo.
as tomadas adicionais sobre o escudo são descritos a seguir:
terminal de parafuso para ligar os motores e seu fornecimento de energia.
2 conectores TinkerKit para duas Entradas Analógicas (em branco), ligado a A2 e A3
2 conectores TinkerKit para duas Saídas Aanlog (em laranja no meio), conectado a saídas PWM em pinos D5 e D6.
2 conectores TinkerKit para a interface TWI (em branco com 4 pinos), uma para a entrada e a outra para a saída.
motor escovado da CC. você pode dirigir dois motores DC Escovado ligando os dois fios de cada um no (+) e (-) terminais de parafuso para cada canal A e B. desta forma você pode controlar sua direção através da criação de ALTA ou BAIXA o DIR Um e DIR pinos B, você pode controlar a velocidade por valores variando o PWM A e B ciclo de PWM. o Freio De Um e de Freio B pinos, se conjunto de ALTA, vai efetivamente freio os motores DC ao invés de deixá-los mais devagar por cortar a energia. você pode medir a corrente vai através da DC do motor através da leitura da SNS0 e SNS1 pins. em cada canal será uma tensão proporcional à corrente medida, o qual pode ser lido como uma entrada analógica normal, através da função analogRead () sobre a entrada analógica A0 e A1 para a sua conveniência é calibrado para ser 3.3 V quando o canal está entregando o seu máximo possível atual, que é 2A.
o comprimento ea largura máxima do Motor Escudo PCB são respectivamente de 2.7 e 2.1 polegadas. quatro furos para parafusos permitem que o conselho para ser ligado a uma superfície ou caso. Note que a distância entre os pinos digitais 7 e 8 é de 160 mil (0.16 "), nem mesmo um múltiplo de 100 mil espaçamento dos outros pinos.
Tensão de Funcionamento
Tensão de funcionamento
5 V a 12 V
controlador do motor
L298N,unidades de motores DC 2 ou 1 motor de passo
Max atual
2A por canal ou 4A max (com fonte de alimentação externa)
atual sensoriamento
1.65 V/A
corrida livre parar e função de freio
Perguntas e respostas
Qual informação você precisa?
Pergunte ao vendedor
Não fizeram nenhuma pergunta ainda.
Faça a primeira!